はじめに
現在の自動車制御ソフトウェア開発において、MBD(モデルベース開発)は一般的な開発手法となってきました。
そこでは、制御アルゴリズムをモデル(数式)で設計し、膨大な数のテスト入力パターンを実行して妥当性確認を行います。そうして出来上がったモデルは”動きを確認できる仕様書”として開発の効率化へ寄与してきました。
自動車に搭載される制御システムの一部を開発および検証する場合、そのサブシステムに対する入力ー出力パターンを検証する単体検証から、制御システムの出力結果車両の挙動にどのように影響するかを検証するシステム検証まで様々な段階があります。これまではシステム検証を行うためには実際のECUや実車両を使用して行う必要がありましたが、車両や周辺環境をモデル化することで、設計段階で車両挙動の検証が行うことができます。そのための実現手法が、今回ここでご紹介する”シミュレーション技術”です。
高まる重要性
ADAS/ADS(自動運転システム)を筆頭に、車載システムの高機能化はますます進み、ソフトウェアサイズの巨大化、複雑化が進むことで、検証項目は増加の一途です。
また、自動車業界で最も注目される自動運転の検証には、膨大な走行パターンの検証が必要となります。
その一方で開発期間の短縮化もより一層求められており、実車検証から開発へのフィードバックによる大幅な手戻りを無くすため、下図に示すように、評価工程での適合検証ではなく設計工程段階でシミュレーション技術を利用して設計内容の検証を行うことの重要性が高まっています。
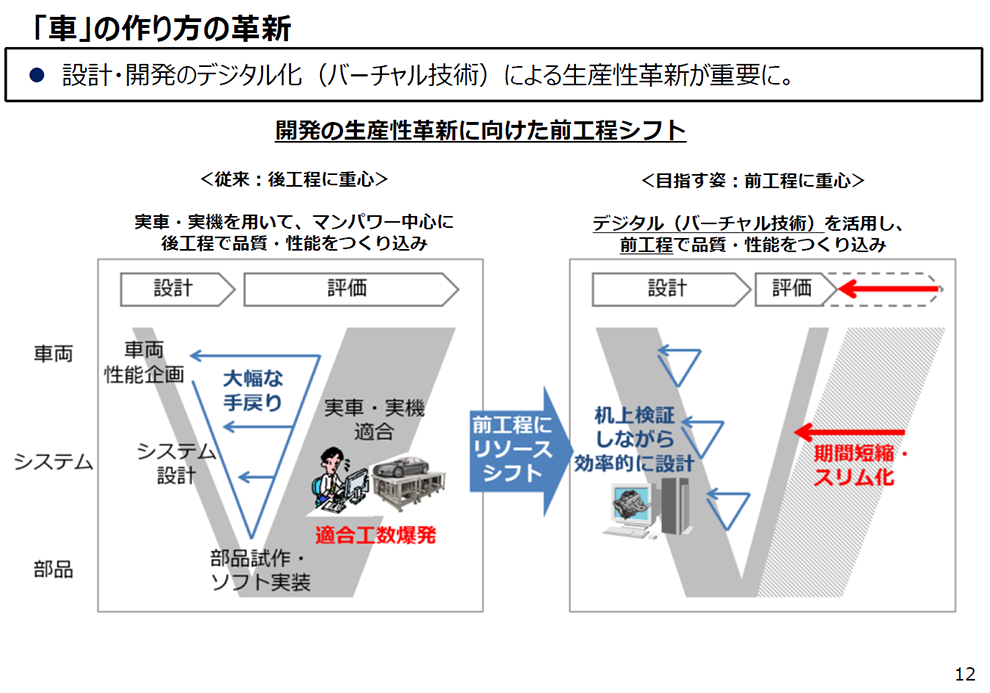
図1 開発期間短縮化のための前工程シフト
(経済産業省.自動車新時代戦略会議(第1回)資料2より引用[1])
また、開発プロセスでの利用だけでなく、製品としての認証プロセスにおいてもシミュレーション技術の利用が求められています。2020年3月に国土交通省は自動運転車に関する安全基準を策定し、その一つとして「シミュレーション試験により防止可能な衝突を起こさないことを証明すること」が規定されています。[2]
2020年11月にホンダが世界で初めて自動運転レベル3の型式指定を国土交通省から取得しましたが、その際には上記に基づきシミュレーション試験を行っています。[3]
シミュレーション技術の概要
特にADAS/ADSの検証を行うためには、シミュレーション技術には以下に示すような機能が求められます。図2はIPG Automotive社のシミュレーションツール”CarMaker”の画面例となります。
-
Vehicle Model
車両の各機構(サスペンション、ステアリング、ブレーキ、…)を数式モデルで現し、パラメータによる調整により、実車両と同等と見なせる挙動を再現します。 -
Sensor Model
車両に搭載される各種センサー(Radar、LiDAR、Camera、Ultrasonic、…)の挙動を再現します。環境モデルで表現されている情報をそのまま出力する機能(Ideal Sensor、理想センサー)だけでなく、実物と同等な検出状況(ノイズの混入、ゴーストなど)を再現するセンサーが必要とされてきています。このようなリアルなセンサーモデルでは膨大な演算処理が必要なため、その演算処理にはGPUを使用するケースが多いです。 -
Maneuver
運転者の操作を模擬するドライバモデルによる運転制御や、他の交通参加者(車、バイク、歩行者、…)の動作を制御して様々なテストケースを作成します。 -
Road Data
テストコースを模した直線やオーバルコースだけではなく、実際と同じリアルな形状の道路データ、さらには道路標識や建造物などの景観を作成します。また、ADSにおいては目標とする走行軌跡を計算するために、走行レーンのWaypoint情報が必要となるため、地図情報からWaypoint情報を抽出する演算が必要な場合もあります。
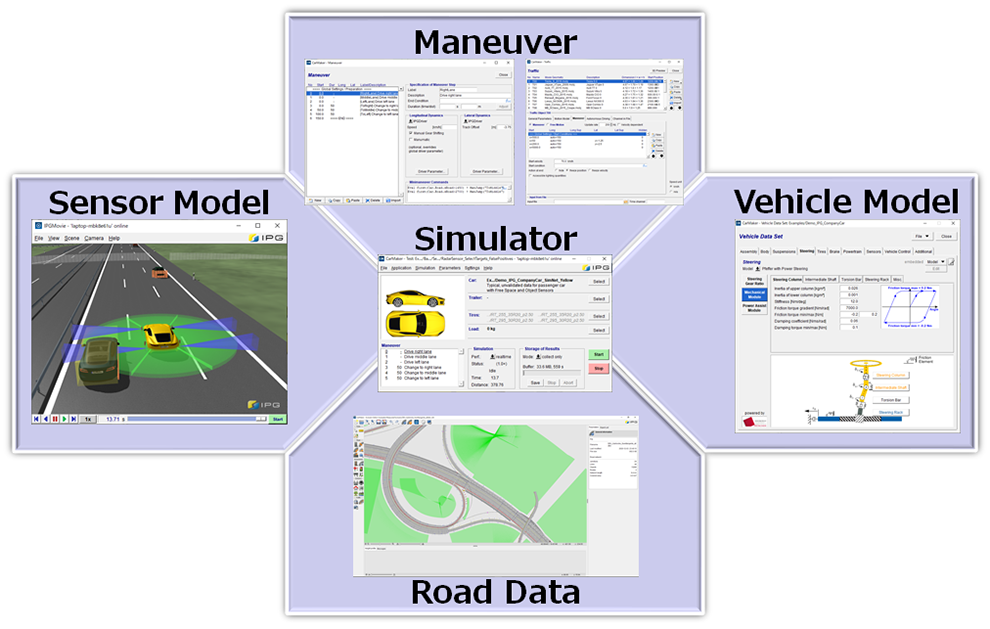
図2 IPG Automotive社のシミュレーションツール”CarMaker”の例
シミュレーション環境構築のための標準化
上記の通り、シミュレーション環境は様々な機能要素で成り立っています。これを一つのシミュレーションツール(例:CarMaker)で実現することも可能ですが、他ツールで作成したデータのインポートや、複数のツールを接続して運用する(Co-Simulation、連成シミュレーション)ことで、よりユーザの目的に沿ったシミュレーションを実現することも可能です。その際のデータ連携やシミュレータツール、モデル間の連携のための標準化も進んでいます。データ連携に関してはASAMにより規格化されているOpenDRIVE、OpenSCENARIO、OSIが、モデル間連携にはMA(Modelica Association)により規格化されているFMI(Functional Mock-up Interface)が主流の標準インターフェースとなっています。
欧州における自動運転システムの安全性評価のフレームワークを検討するプロジェクト”PEGASUS”と、そのシミュレーション分野の後継プロジェクトである”SET Level 4to5″においても、これらの標準を活用してます。また、日本国内においても、例えばSIP(戦略的イノベーション創造プログラム)の一つ、SIP-adus(SIPにおける自動運転への取組)においても、自動運転の安全性評価シミュレーション構築に、ASAM OpenDRFIVE、ASAM OpenSCENARIOなど、標準のオープンインタフェースを採用する研究が行われています。[4]
-
ASAM
(Association for Standardisation of Automation and Measuring Systems、自動化システムと測定システムの国際標準化団体)
自動車の開発とテストにおけるツールチェーンの標準化を推進する非営利団体。
https://www.asam.net/シミュレーション技術に関連する主なASAM標準
-
OpenDRIVE … Road Dataに関する標準フォーマット
-
OpenSCENARIO … Maneuver(自車操作/他車挙動指定) に関する標準フォーマット
-
OSI (Open Simulation Interface) … Sensor Dataに関する標準フォーマット
-
-
PEGASUS
-
プロジェクト期間 : 2016年1月~2019年6月
-
ドイツ経済エネルギー省により設立された、産官学17団体によるプロジェクト
-
自動運転機能の評価方法、および実現するツールチェーンの構築を目標
-
高速道路の自動運転レベル3を念頭においている
https://www.pegasusprojekt.de/
-
-
SET Level 4to5
-
プロジェクト期間:2019年3月~2022年8月
-
PEGASUSの後継プロジェクトの一つ(シミュレーション分野に特化)
-
都市部における自動運転レベル4および5の車両を、シミュレーションベースで分析と試験することをサポートする、オープンで柔軟性のある拡張可能なプラットフォームを作り出すことが目標
https://setlevel.de/
-
<参考資料>
[1]:経済産業省.自動車新時代戦略会議(第1回)資料2.
https://www.meti.go.jp/committee/kenkyukai/seizou/jidousha_shinjidai/001_haifu.html
[2]:国土交通省.自動運転車に関する安全基準を策定しました!.別添2.
https://www.mlit.go.jp/report/press/jidosha07_hh_000338.html
[3]:国土交通省.世界初! 自動運転車(レベル3)の型式指定を行いました.
https://www.mlit.go.jp/report/press/jidosha08_hh_003888.html
[4]:SIP-adus Workshop 2020.自動運転の安全性評価シミュレーション構築についての研究.
https://www.sip-adus.go.jp/evt/workshop2020/file/sr/SR_11J_Inoue.pdf
富士ソフトのシミュレーション実績についての詳細は下記をご覧ください。

個別相談も承っております。下記よりお申し込みください。