COLUMN
自動運転の実現に向けて―MIPI D-PHY℠ の重要性
自動車が発明された1世紀以上前から、自動車メーカーは可能な限り高速・安全・低燃費な自動車の開発に注力してきました。これらの各項目がほとんどピークに達したため、メーカーは新しいテクノロジーに目を向けて、他社との差別化の手段として取り入れつつあり、わずか20年前にはSFの世界だった機能をカメラとセンサーの実装で実現されています。これらの技術によって、運転者がA地点からB地点まで手動運転で移動していたものが、ますます人間による制御の必要が無くなり、徐々に運転者を乗客という概念に変えようとしています。
カメラとセンサーは、自動車業界にとって真新しいものではありません。ダッシュボードとバックアップカメラは、過去10年間で広範囲に採用されるようになりました。ただし、カメラとセンサーを自動運転システム(ADS:Autonomous Driving Systems)への第一歩としての高度な運転者支援システム(ADAS:Advanced Driver-Assisted Systems)に搭載されるのは最近のことです。これらのカメラとセンサーは連携して死角をなくし、車線逸脱の場合に警告を発し、車間の距離を一定に保ち、事故による死亡率を減らし、自動車全体をより安全にします。これを実現する舞台裏では、各カメラとセンサーからの膨大な量のデータを超高速で処理する必要があります。これには、自動車アプリケーション固有の課題に対する独自のSOCソリューションが必要です。
ADASがスムーズに機能するためには、組み込まれたカメラとセンサーのSOCデザインは、高い帯域幅をサポートし、より高いセンサー解像度、より低いシステム遅延、高ダイナミックレンジとディスプレイ解像度の要件に対応する必要があります。これらの要件を満たすには、低電力の必要性と厳しい安全性試験に合格する必要があります。ADASに必要なデータ要件に対応することで、過去数年間で自動車のセンサーとディスプレイをサポートするインタフェースと仕様の採用が大幅に増加しました。速度の要件を満たす複数のインタフェースがありますが、MIPI®の特性は、高速、低遅延、低消費電力の要件において最適なバランスを提供します。これは、MIPIの仕様がモバイルおよびモバイルに影響されるアプリケーションの厳しい要件を満たすように作成されているためです。では、今日のADASにおける主要なMIPIの特性と、それらがこの急成長するテクノロジーをどのように強化するかを詳しく見てみましょう。
ADASにおけるMIPI
表示とセンシングの両方のADASアプリケーションはイメージング、センシング、高速シリアル通信、およびダウンストリーム処理機能を処理する必要があるため、カメラビデオプロセッサ(CVP:Camera Video Processors)は常にこれらのシステムの中心となります。より複雑なタスクに対応するためにシステムにカメラとセンサーが追加されるにつれて、より統合されたCVPソリューションが必要になります。理想的には、これらのCVPは、複数の高ダイナミックレンジセンサーから受信したデータを処理し、高解像度ディスプレイ、自動車SerDesリンク、コンピュータービジョンプロセッサーを最小限の電力消費と低レイテンシで駆動する必要があります。ここにおいてMIPIの特長の出番となります。
高帯域幅パフォーマンス、スケーラビリティ、低遅延、低電力、低EMIは、MIPI物理層とプロトコル仕様の基本的な機能です。これらのユニークな属性は、車載アプリケーションに最適であり、MIPI D-PHY℠ はすべてのADASアプリケーションの前提条件となっています。 MIPI D-PHYは、1つのクロックレーンとさまざまな数のデータレーンを使用する単純なソース同期PHYです。 2009年以降、MIPI CSI-2℠ およびDSI℠ (およびそれ以降のDSI-2℠ )アプリケーションに広く導入されています。シングルレーンD-PHY v1.2構成には、4つのピン、クロックレーン用の2つのピン、データレーン用の2つのピンが必要で、最大2.5 Gbpsのデータレートを実現します。
図1はADASビジョンシステムの概要を示し、そのようなシステムでのMIPIインタフェースの役割を示しています。
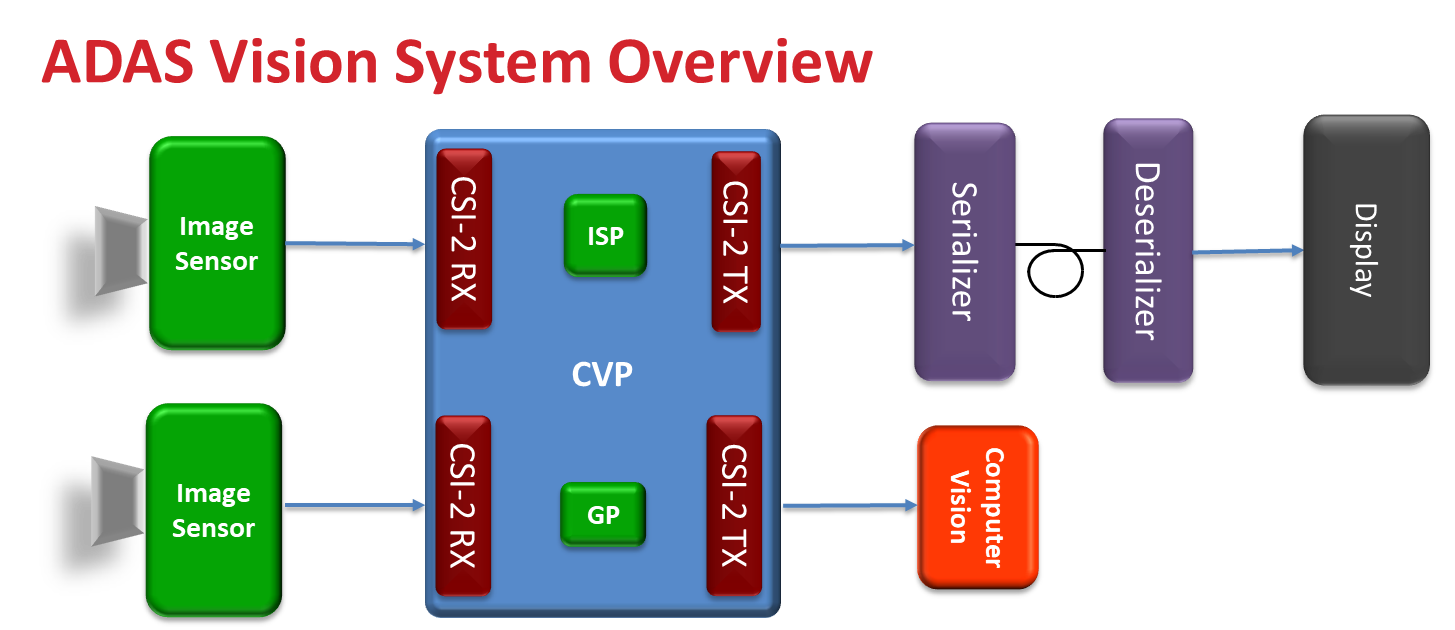
図1:ADAS Vision Systemで使われるMIPI
図1からわかるように、CSI-2インタフェースは、センサーとCVP間の通信リンクとしてADASアプリケーションで一般的に使用されています。 CVPは、処理されたビデオをMIPI CSI-2 TXインタフェースを介して自動車のSerDesリンクに駆動します。これは、MIPI D-PHYベースのDSIインタフェースを介して高解像度ディスプレイを駆動します。コンピュータービジョンアプリケーションの場合、未処理の高解像度ビデオは、MIPI CSI-2 TX / RXインタフェースの別のペアを介してCVPからコンピュータービジョンプロセッサに送信されます。 DSIとCSI-2は、MIPI D-PHY物理層を介してデータを送信するMIPIプロトコルです。
次に、Mixel社のMIPI D-PHY IPがどのようにしてADASアプリケーションの進歩を可能にする重要な役割を果たしているか見てみましょう。
ADASアプリケーションの進歩に寄与するMixel社のMIPI D-PHY IP
Mixel社のMIPI D-PHY TXおよびRX IPは、送信および受信機能用に最適化されており、エリアのオーバーヘッドを削減します。それぞれが最大4レーンをサポートし、D-PHY v1.2はレーンあたり2.5 Gbpsで実行されます。
D-PHY TXの場合、すべてのレーンで最大10 Gbpsの合計帯域幅を持つCSI-2 TXコントローラーが使用され、仮想チャンネルのサポートが含まれます。 Mixel D-PHY RXは帯域幅が似ており、CSI-2 RXコントローラーを使用します。これは自動車用アプリケーションであるため、D-PHY TXとRXの両方は、オートグレード0/1/2温度範囲に対してAEC-Q100に準拠しています。
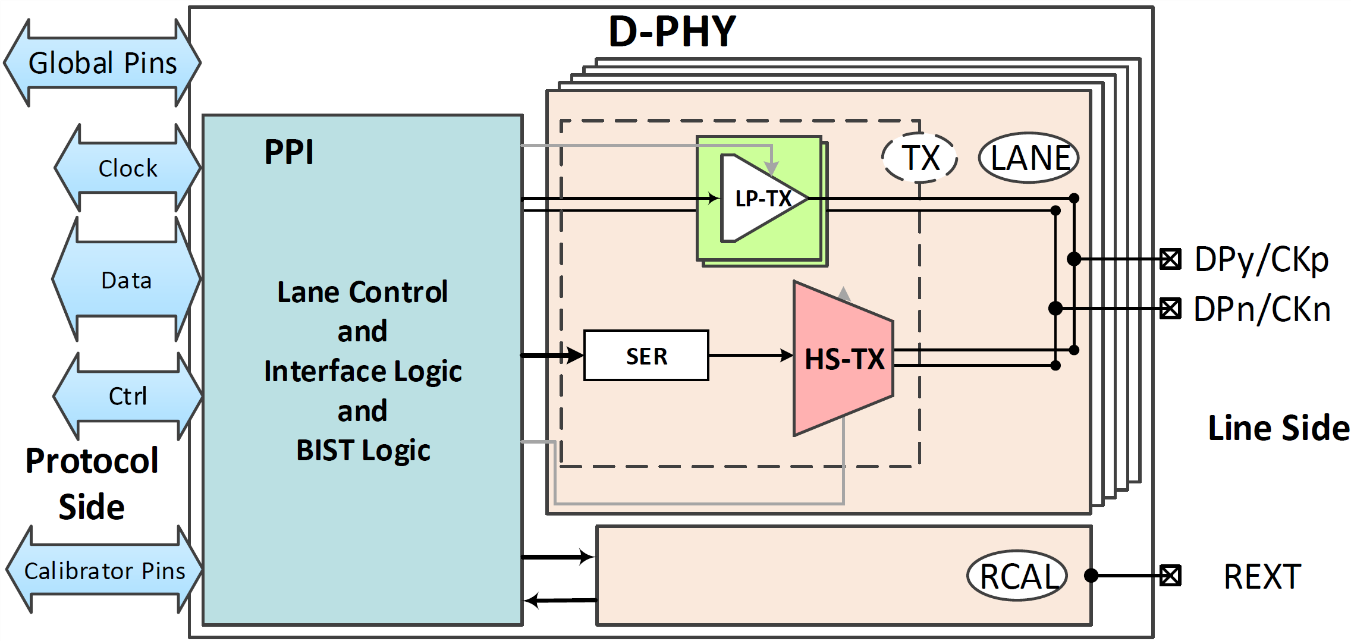
図2:Mixel社MIPI D-PHY Txのブロックダイアグラム
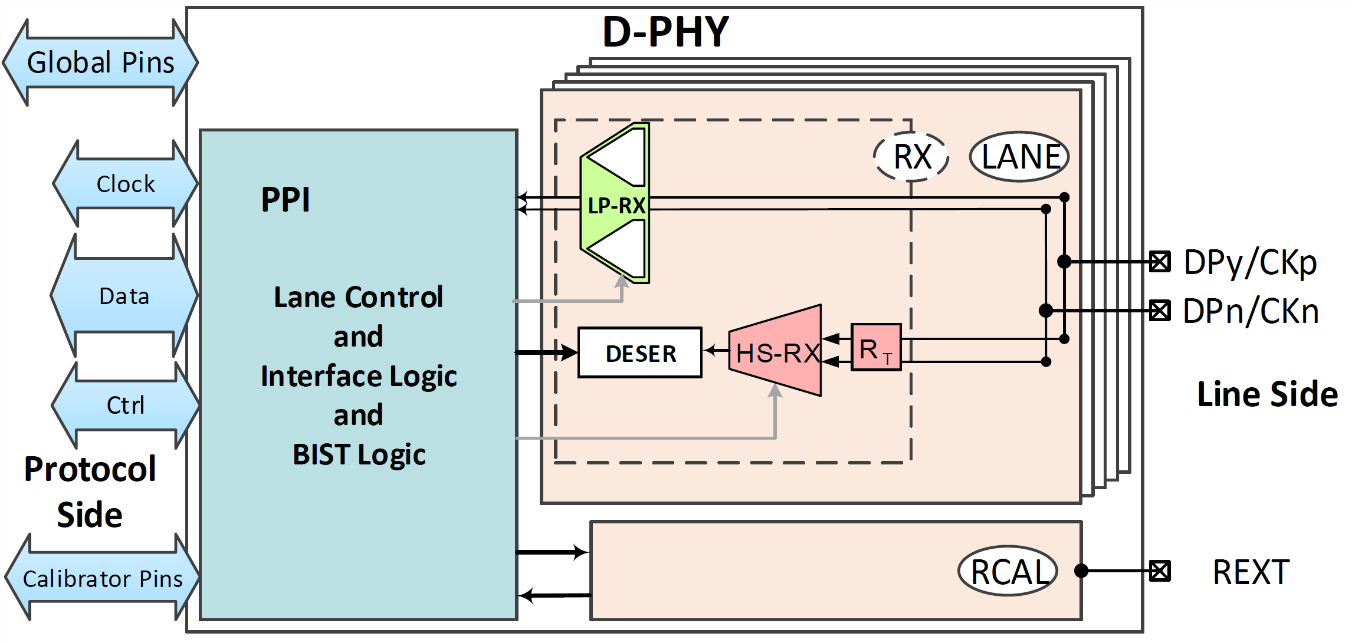
図3:Mixel社MIPI -DPHY RXのブロックダイアグラム
各PHYには、いくつかの階層(IC、PCB、システム)でPHYのテストを可能にするBIST(Built-in-self-test)エンジンも装備されています。 BISTエンジンは、さまざまなMIPI動作モードでPHYをテストでき、観測性と制御性を向上させます。量産テストと特性テストの両方を可能にするために、さまざまなテストシナリオが実装されています。
Mixel社MIPI D-PHY IPは、複数のプロセスノードおよびファウンドリでシリコン実績を持ち、自動車アプリケーション向けチップで広く展開されています。
GEO社での利用実績
GEO社は、自動車用ビューイングカメラにCVPベースのソリューションを提供するマーケットリーダーであり、最近発表された次世代自動車カメラ用のGW5 CVP製品ファミリにMixel社製D-PHY v1.1 RXおよびTXソリューションを統合し、スピンなしでファーストシリコンで成功を収めました。Mixe社製D-PHY v1.1は、1レーンあたり1.5 Gbpsのデータレートをサポートし、4つのデータレーンを使用して6 Gbpsの総帯域幅を実現します。
GEO社のGW5 CVP製品ファミリは、世界初のエッジベースの自動車用スマートビューイングカメラプロセッサです。 GW5200は自動車カメラのビデオ品質の最先端であり、GW5400はカメラ内のコンピュータービジョンを追加し、歩行者、物体、死角検知、交差交通警告、ドライバーの注意力監視、スマートカメラの自動キャリブレーションなどのADAS向け機能を有効にします。
GEO GW5は最大8メガピクセルの解像度をサポートし、GEO独自の第5世代eWARP®ジオメトリックプロセッサ、革新的なハイダイナミックレンジ(HDR:High Dynamic Range)画像信号プロセッサ(ISP:Image Signal Processor)、および2Dグラフィックス機能を備えています。ISPは、最新のHDRとLEDフリッカー抑制をサポートしています。また、最大4つの露出のオンチップマージが可能で、最大140dBのダイナミックレンジを実現します。2D Vector Graphics Engineは、高解像度のリアルタイムグラフィックをレンダリングしてビデオストリームにオーバーレイし、魅力的なユーザーインタフェースを実現します。 GW5 CVPは、ISO 26262 ASIL-Bを満たすように開発されており、AEC-Q100グレード2の認定を受けています。
GW5ファミリのメインビデオインタフェースとして、D-PHY RXおよびTXインタフェースの両方が必要です。D-PHY RXの場合、すべての自動車センサーはMIPI CSI-2 D-PHY v1.1または1.2向けです。 GW5 CVPの使用例では、デュアルセンサーのサポートに2つのD-PHY RXインタフェースが必要となりました。 3つ以上のセンサーが必要な場合、MIPI仮想チャンネルを使用して、単一のMIPI D-PHY RXインタフェースごとに複数の独立したセンサーを処理できるようにし、GW5がサラウンドビューモニターなどのアプリケーションをサポートできるようにします。各MIPI RXインタフェースは、HDRセンサーから送信された複数の露出設定画像を受信し、それらを単一の高ダイナミックレンジビデオに再結合することもできます。
D-PHY TXの場合、高帯域幅のビデオダウンストリームを提供するために2つのインタフェースが展開されました。 2つのインタフェースを使用して、処理済みのビデオを表示用に、未処理の高解像度ビデオをコンピュータービジョン用に送信できます。 MIPI仮想チャンネルを使用すると、各インタフェースは同じMIPIポートで複数のビデオチャンネルを送信できます。この機能は、デュアルセンサー入力の場合に使用できます。2つのビデオストリームを個別に処理し、仮想チャンネルを介して同じMIPI TXインタフェースで送信できます。 GEO GW5でのMixel社D-PHY TXおよびRXのテスト結果の2つのスナップショットを以下に示します。
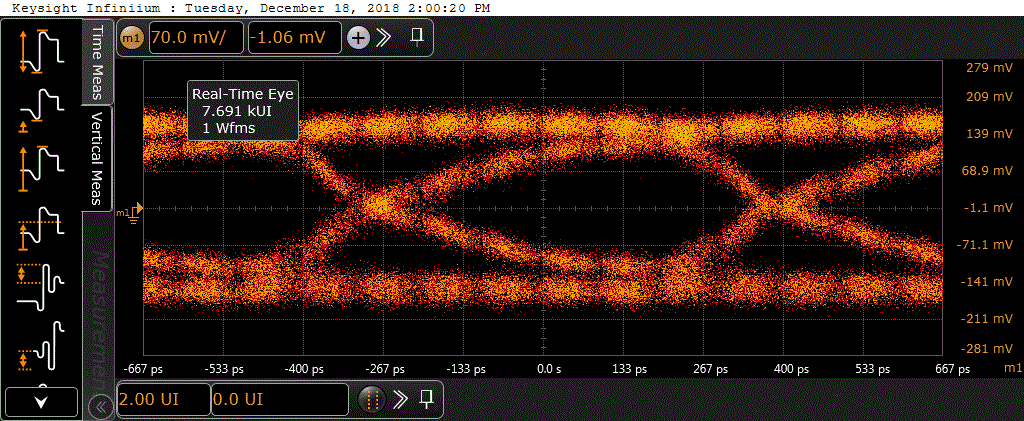
図4:Mixel社MIPI D-PHY TXの1.5Gsps時のアイダイアグラム
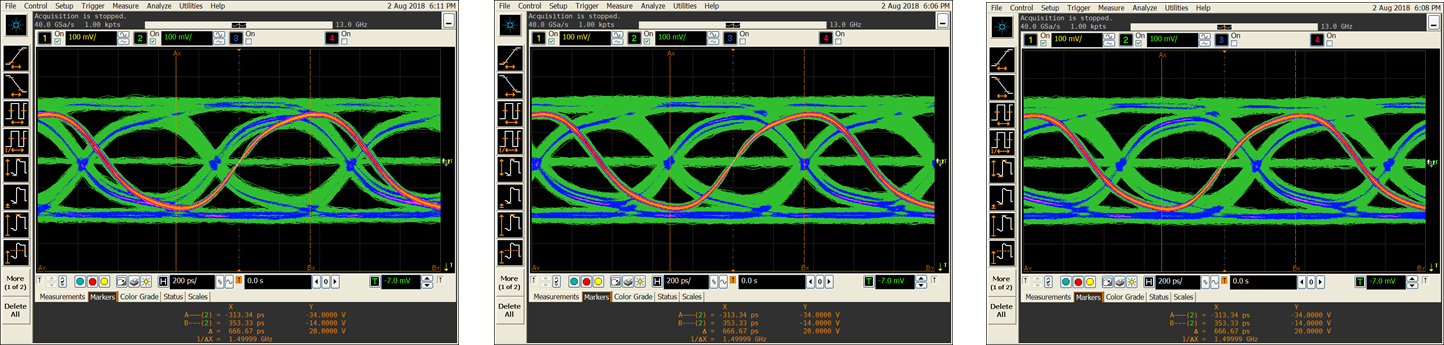
図5:Mixel社MIPI D-PHY RXの1.5Gbps時のセットアップ/ホールドマージン
未来の運転
ADASアプリケーションの進化と多数のドライバーアシスタンス機能の採用の増加により、全体的な運転体験、安全性、快適性、利便性が引き続き向上し、完全自律型車両(AV:Autonomous Vehicles)に代表される最高レベルの自動化が実現されつつあります。
ADSを使用すると、車両はすべての条件下ですべての運転機能を実行できる必要があります。これを達成するために、車両は内部の複雑なシステムと通信するだけでなく、外部環境とより多くの通信が行われます。将来の自動車技術では、増え続けるカメラ、レーダー、ライダーセンサーが引き続き使用されます。センサー技術は、より堅牢で、より複雑なタスクを処理できる必要があります。オートモーティブシステムのコンポーネントは、より多くのデータ通信を処理するために、より高速で、最小限のレイテンシと消費電力でより高いパフォーマンスを提供する必要があります。
MIPI CSI-2 / DSIプロトコルとより高い帯域幅のD-PHYは、高性能の自動車用センサーとシステムのサポートに向けて発展し続けることでしょう。 Mixel社の多くのMIPI PHY最適化構成、特許取得済みの独自のテスタビリティ機能、ファウンドリとプロセスノードの広範囲なサポート、および増加するデータレートのサポートにより、Mixel社はMIPIエコシステムのサポート、特に指数関数的に成長する自動車市場において中心的な役割を果たし続ける態勢が整っています。
参照:
• Turning Cars into Mobile Devices: MIPI
• MIPI D-PHY RX+: An Optimized Test Configuration
関連製品
Mixel社製MIPI D-PHY
著者プロフィール

Mahmoud Banna
2011年からMixel社エジプトのASICチームを率いています。現役職に就任前は、USBやPCI Expressなどのシリアルリンク製品の開発チームを率いており、ASICの設計とマネージメントで12年の経験があります。Ain Shams大学でBSEEを、カイロのAmerican UniversityでMBAを取得。

Julian Schiralli
GEO Semiconductor社のプリンシパルASICデザイナーであり、ビデオ分野で20年以上経験。テレビとコンピューターモニターの両方でフラットパネルLCD革命を目の当たりにし、ジェネシスマイクロチップ社やSTマイクロエレクトロニクス社などの企業でチームメンバーとマネージャー経験あり。近年では自身は自動車部門とその課題に注目。
個別相談も承っております。下記よりお申し込みください。