COLUMN
次世代ロボット開発!NVIDIA Isaacによる先端ロボット開発 – Conveyor Belt Utility編
前回のコラムでは自動的に倉庫を生成する「Warehouse Creator」についてご紹介させていただきました。今回は、Isaac Simの拡張機能である「Conveyor Belt Utility」を紹介します。
Gazebo等の一般的なロボットシミュレータではベルトコンベアの外見や処理の実装は容易ではありませんが、Isaac Simでは事前に拡張機能として用意されており、簡単にシミュレータ上にベルトコンベアを作成することができます。
概要
今回紹介する「Conveyor Belt Utility」は、Isaac Simの拡張機能で、ベルトコンベアのオブジェクトを生成する機能を持っています。
Conveyor Belt Utilityの起動手順
Warehouse Creator起動
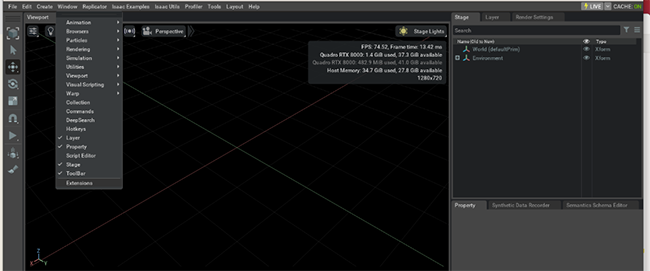
I Isaac Simを起動した後、「Conveyor Belt Utility」の拡張機能を有効にするには、上部のメニューバーからWindow > Extensionsを選択して、拡張機能の一覧画面を開きます。
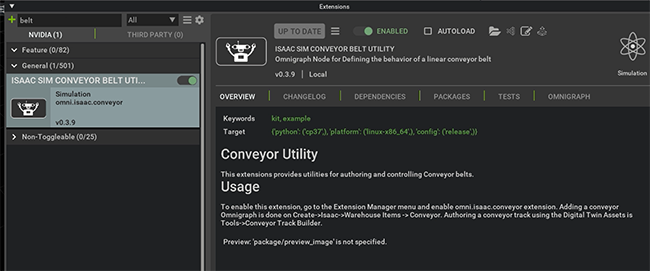
次に、左上の検索バーに「belt」と入力し、検索結果の「ISAAC SIM CONVEYOR BELT UTI…」の名前の右側にある丸いボタンをクリックし、機能を有効にします。
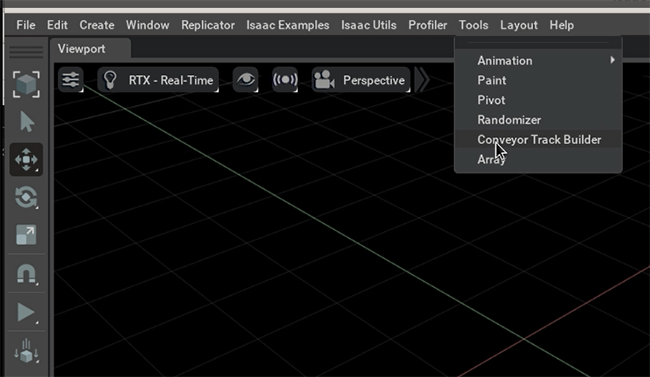
すると、Tools欄に「Conveyor Track Builder」という項目が追加されているで、これをクリックします。
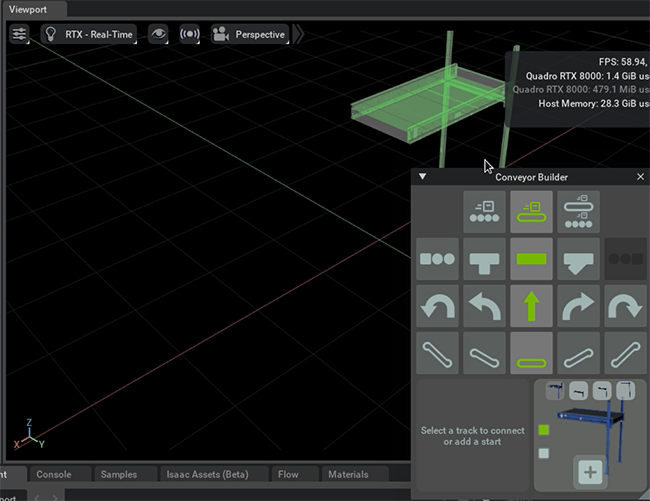
これにより「Conveyor Utility」というGUIと半透明のベルトコンベアオブジェクトが追加されることが確認できます。
Conveyor Utilityの機能
Conveyor UtilityはGUIからベルトコンベアの設定を行い、接続することができます。
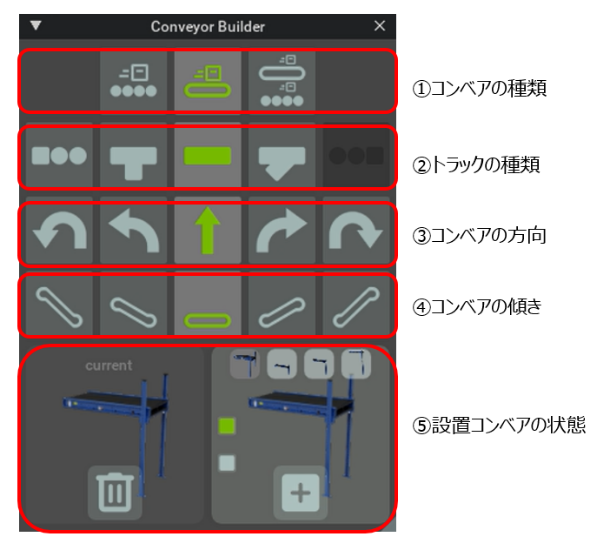
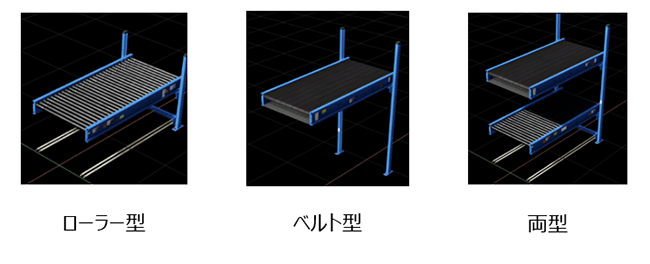
①コンベアの種類
ベルトコンベアの種類を変えることができます。
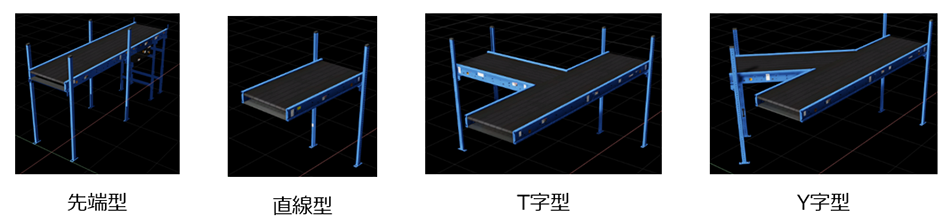
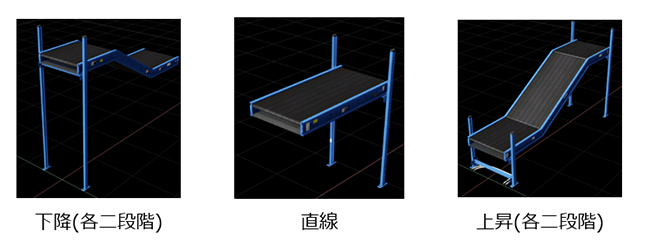
②トラックの種類
トラックの形状を選択します。
③コンベアの方向
ベルトコンベアの方向を変更します。
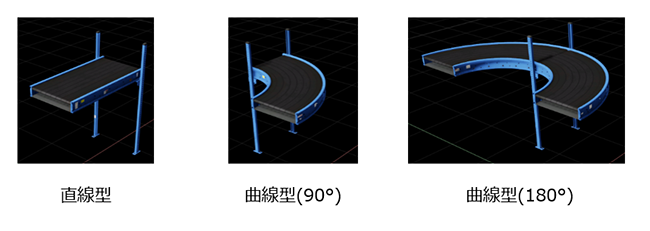
④ベルトコンベアの傾き
ベルトコンベアの途中で高さを変更する設定です。
⑤設置コンベアの状態
選択しているコンベアオブジェクトと次に追加するコンベアオブジェクトを表示しています。
ここからコンベアの削除や追加、コンベアの高さ変更や接続する向きの変更を表示されているボタンから行うことができます。
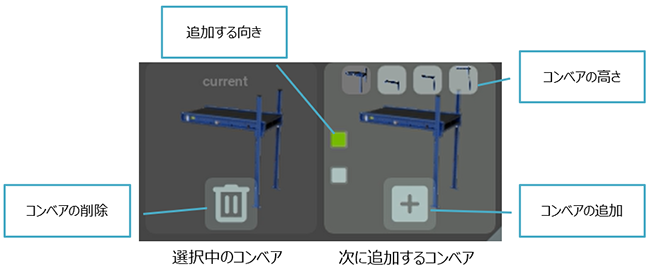
①~④までの項目を選択し、右下の+ボタンを押すことで、次々とベルトコンベアを追加することができます。
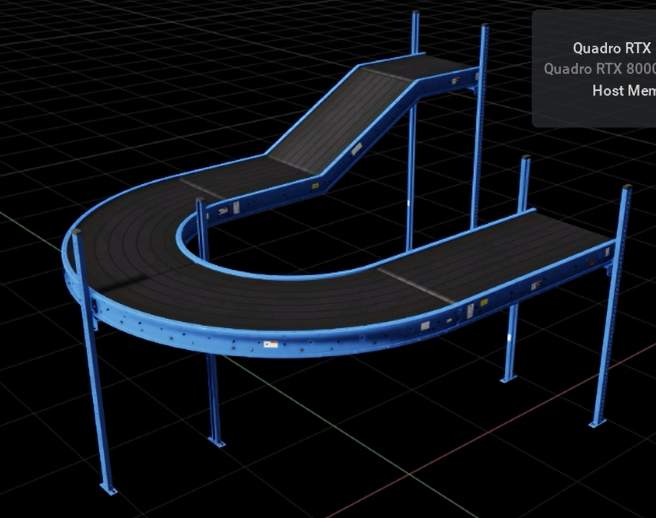
コンベアの動作
次にここまで紹介した機能で作成したコンベアを実際にシミュレーション上で動作させてみます。
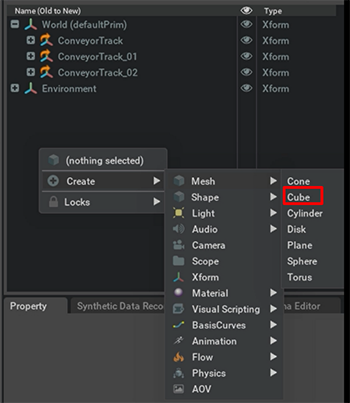
ベルト上で動かすオブジェクトの追加
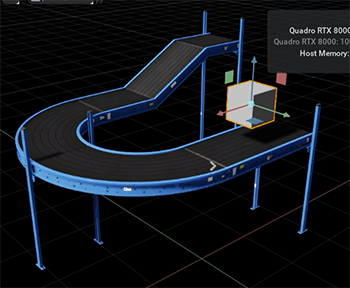
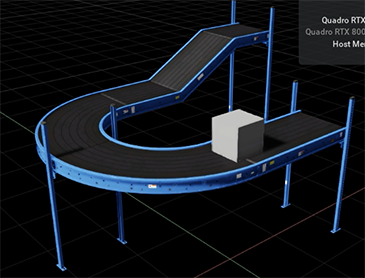
まずはコンベアで動かすオブジェクトの追加です。レイヤー一覧を右クリックし、Create→Mesh→Cubeを選択し、直方体を生成します。
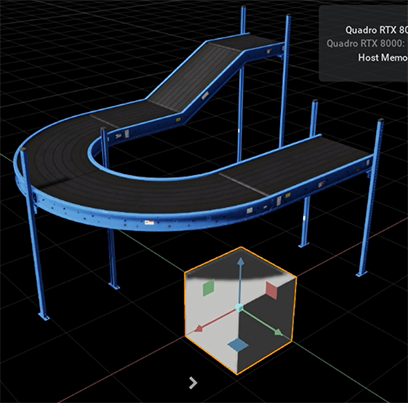
次にプロパティから直方体のサイズとオブジェクトの位置を調整します。
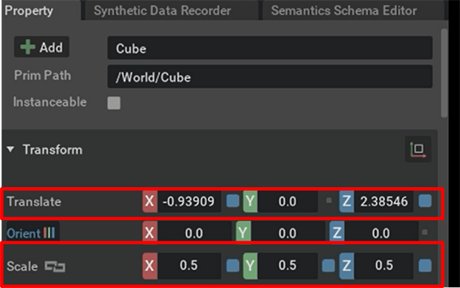
レイヤー一覧から先程生成したCubeを選択し、右下のProperty欄のTransformから
Translate, Scaleの値を設定し、位置とサイズを調整します。
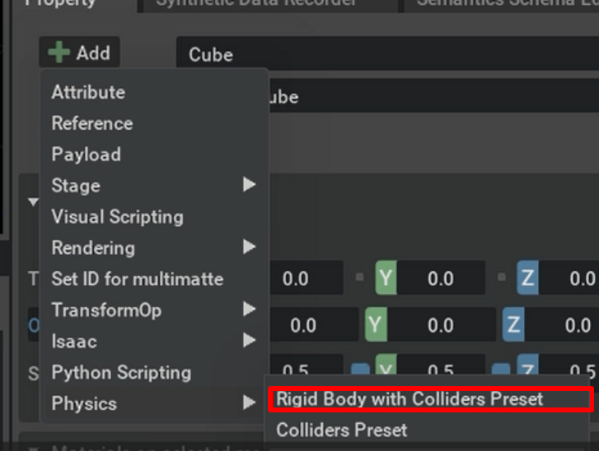
その後、「+Add」ボタンを押し、Physics→Rigid Body With Collider Presetをクリック。Cubeに物理演算を適用します。
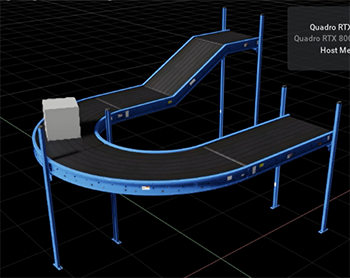
ベルトの速度変更、動作
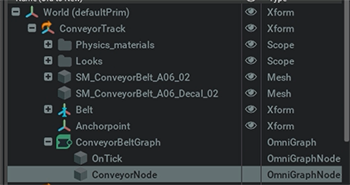
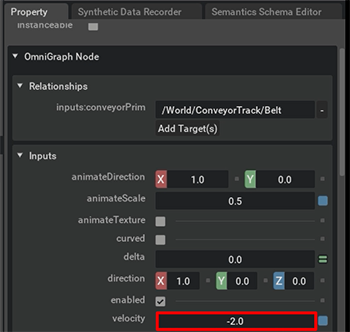
次にコンベアの速度を設定します。この設定は生成されたレイヤー一覧のConveyorTrack〇〇内、ConveyorBeltGraph/ConveyorNodeのプロパティInputsのvelocityという項目から変更することができます。
まず、ConveyorTrack_01,ConveyorTrack_02内のConveyorNodeを複数選択し、velocity内の数値を変更し、値を一括変更します。
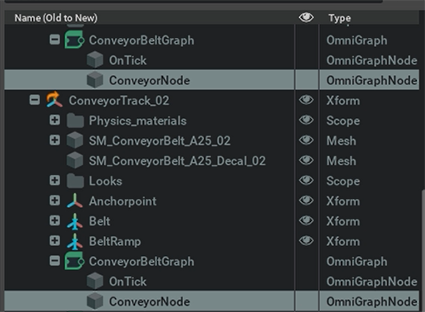
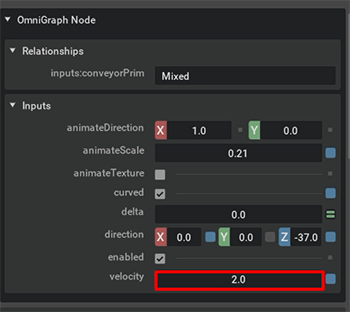
最初に生成されるコンベアオブジェクトの「ConveyorTrack」はデフォルトの向きが、次以降に生成されるベルトコンベアと動く向きが逆になっているため、こちらのvelocityにはマイナスをつけた数値を設定します。
ここまででベルトコンベアの設定は完了となります。この状態で、Isaac SimのPlayボタンを押すと、ベルトコンベア上をオブジェクト移動することが確認することができます。
まとめ
Conveyor Belt Utilityは、NVIDIA Isaac Sim内で使用できるベルトコンベアの作成機能です。この機能を使えば、ベルトコンベアを作るための細かい処理をする必要がなく、簡単にベルトコンベアを生成することができます。このような簡単に倉庫の機器を生成できる機能によって、シミュレーション環境の構築が容易になります。
関連ソリューション
ROS/ROS2開発支援サービス
バーチャル・テスト・ドライブ受託開発ソリューション
ロボットシミュレータ構築支援サービス
富士ソフトの組み込み受託開発
個別相談も承っております。下記よりお申し込みください。