Adopting the stereo vision algorithm developed by Dr. Saneyoshi, who is a leading researcher on stereo camera for vehicles.
End of sale
Private: Stereo Vision IP Suite
Private: FUJISOFT
This is the evaluation kit for high performance Stereo Vision IP Suite from Fujisoft.
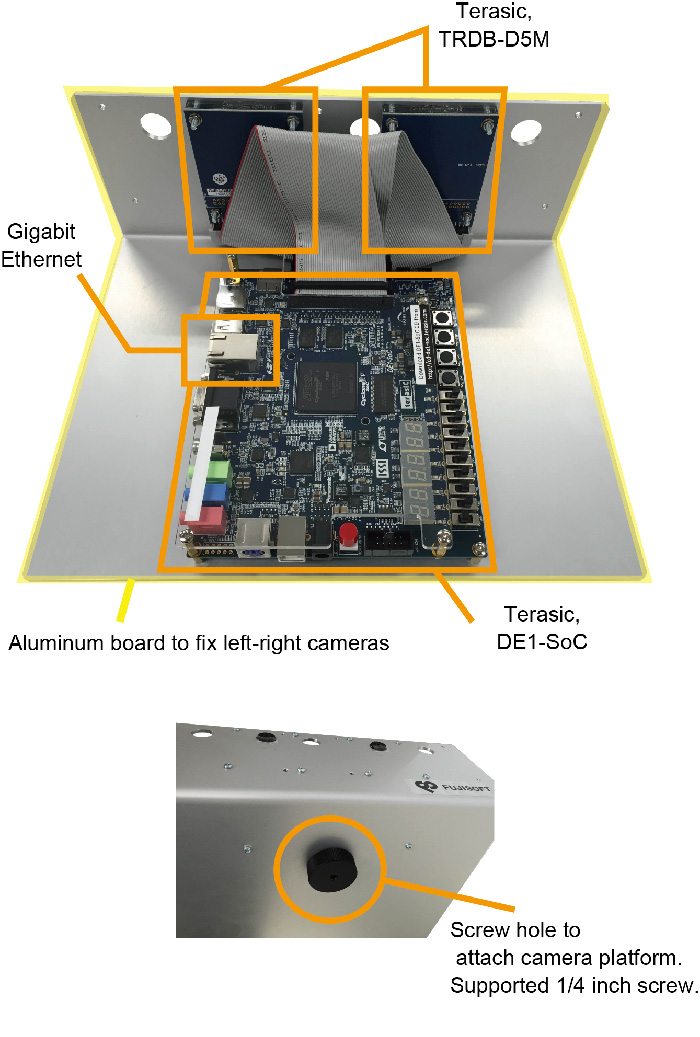
You can start evaluation immediately with our all-in-one evaluation kit at reasonable prices, which includes Altera® Cyclone® V SoC evaluation board, Stereo Vision IP Suite evaluation version, and 5 megapixel CMOS stereo camera. Software for computer and stereo image viewer are also included.
A stereo camera is one of sensor that measures distance as well as infrared and millimeter wave radar. It uses triangulation with stereo camera same as when people see things. Shooting images with two cameras on the left and right produces disparity data. It can measure the distance from cameras to the object surface with this disparity data. It also can be used to detect unevenness of surrounding area, to measure the actual size of the object and the location. Furthermore, it can accurately identify marks on the road surface such as white line, yellow line, etc., and side walls and road shoulder, which are boundaries of the driving area, which are difficult with infrared and millimeter wave radar.
| Baseline | 100 mm, 149 mm, 198 mm |
|---|---|
| Image size | 1280 (H) x 720 (V) |
| Frame rate | 30 fps |
| View angle | approx. 42 degree |
| Disparity search range | 256 pixels |
| Supported distance range / distance accuracy |
Theoretical value Baseline:100 mm approx. 640mm to 165m approx. 2.2%(*1) Baseline:149 mm approx. 960mm to 245m approx. 1.5%(*1) Baseline:198 mm approx. 1300mm to 330m approx. 1.1%(*1) * Theoretical value means the supported maximum distance which the system can get distance information when it has ideal image input. *1 when measuring distance to 30m ahead |
| Latency | approx. 2ms between Rectification Distortion Correction IP input to Stereo Matching IP output. |
| Output image | 8 bit for each left and right camera image Left-right camera image after correction 8 bit for each disparity image, 12 bit (integer 8 bit, floating 4 bit) |
| Output interface | Gigabit Ethernet |
| FPGA Use Resources | ALMs:25.6 K (LE:67.7 K), RAM:3.1 M bit
[Detail] Image input I/F 0.5 K ALMs (1.3 K LE) Rectification Distortion Correction IP 2.0 K ALMs (5.2 K LE) Stereo Vision 7.4 K ALMs (19.6 K LE) Object Detection 10.7 K ALMs (28.3 K LE) Other 5.0 K ALMs (13.2 K LE) |
| Hardware |
|
|---|---|
| Software |
|
| Document |
|
