Adopting the stereo vision algorithm developed by Dr. Saneyoshi, who is a leading researcher on stereo camera for vehicles.
End of sale
Private: Stereo Vision IP Suite
Private: FUJISOFT
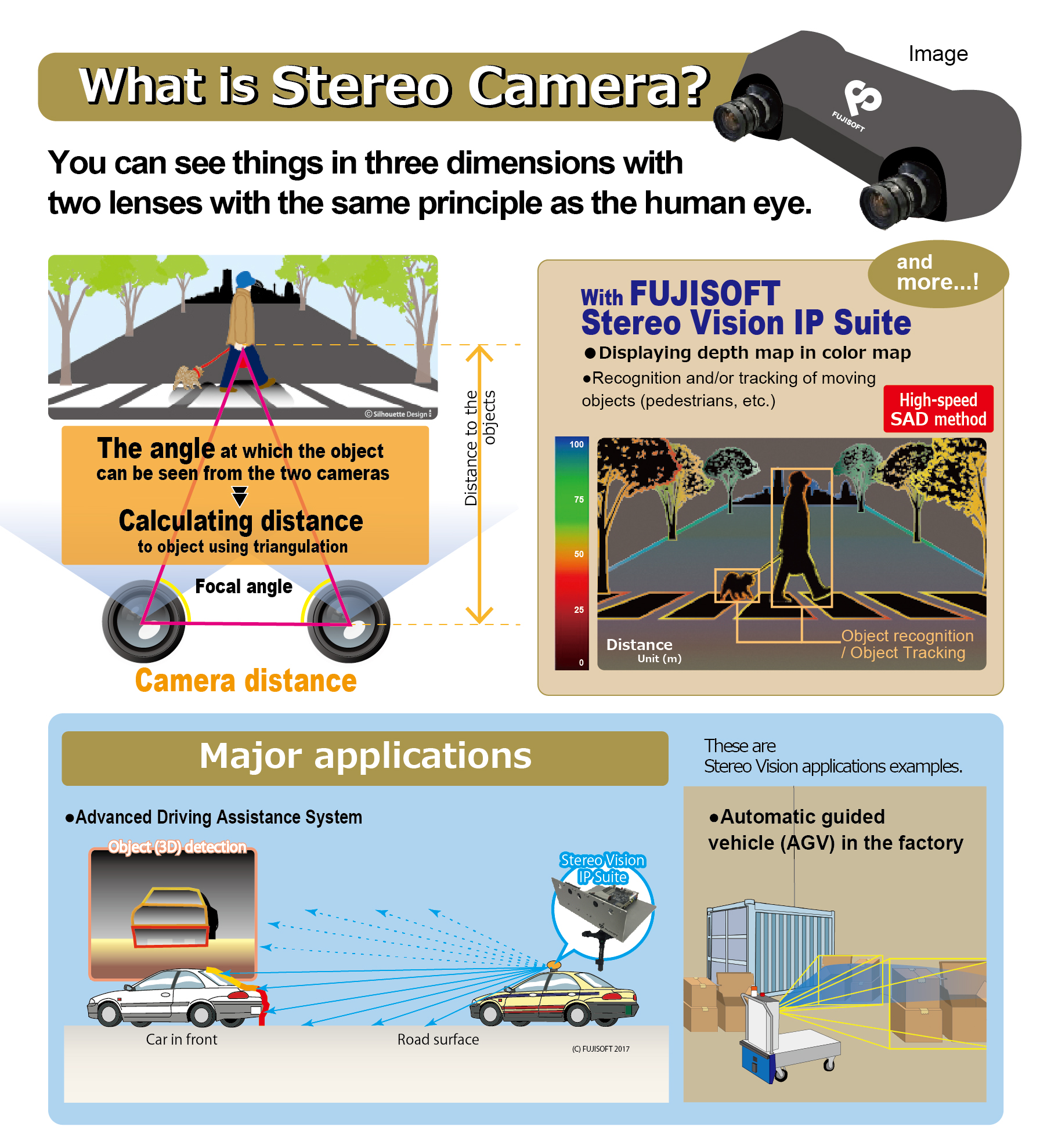
Stereo Vision IP Suite measures distance between the cameras and target objects with very high accuracy by using triangulation method.
The followings are the introduction of sensing and image processing technology of our Stereo Vision IP Suite.
A stereo camera is one kind of sensor that measures distance as well as infrared and millimeter wave radar. It uses the principle of triangulation with stereo camera which is the same as when people see things. Images taken with left and right lenses produces disparity data which is used for calculating the distance from cameras to the object surface. It also can be used to detect unevenness of surrounding area, to measure the actual size of the object and the location.
Furthermore, it can accurately identify marks on the road surface such as white line, yellow line, etc., and side walls and road shoulder, which are boundaries of the driving area. This is difficult to achieve with infrared and millimeter wave radar. In this way, stereo cameras can be widely applied as an alternative to visual object recognition.
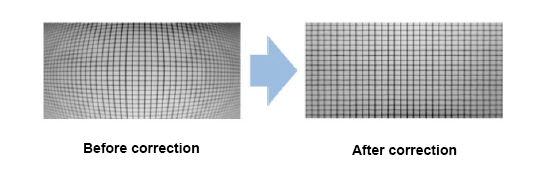
With Rectification Distortion Correction function, the system correct image distortion produced by lens distortion and camera position displacement. In the next Stereo matching process, using images taken with two cameras matching with a sub-pixel resolution within 0.1-pixel error, it calculates an accurate distance between cameras and objects.
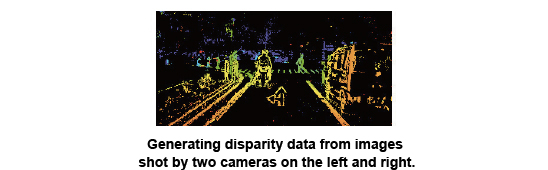
Our Stereo Vision IP adopts SAD (Sum of Absolute Difference) to calculate disparity. The system produces disparity and distance data with camera images on left and right.
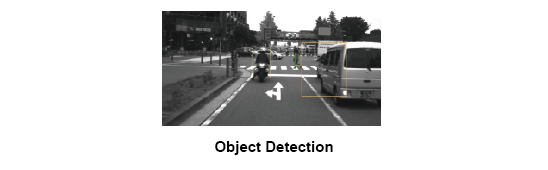
Three-dimensional objects are detected in 3D from parallax (distance) information, and the distance to the detected object and its size are informed. It also has an object tracking function that keeps track of the same object between frames.
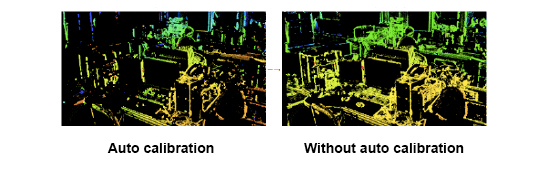
The mounting positions of the two cameras used in the stereo camera are influenced by temperature, vibration and so on, so that deviation occurs as time elapses. The accuracy of the obtained disparity information, density and distance information decreases. However, it is possible to maintain this accuracy with automatic calibration.
* Functions for stationary applications (surveillance cameras, etc.)
You can start evaluation immediately with our all-in-one evaluation kit at reasonable cost, which includes Altera® Cyclone® V SoC evaluation board, Stereo Vision IP Suite evaluation version, and 5 megapixel CMOS stereo camera. The kit also includes software for computer and stereo image viewer.
Learn more about evaluation kit.

