Adopting the stereo vision algorithm developed by Dr. Saneyoshi, who is a leading researcher on stereo camera for vehicles.
End of sale
Private: Stereo Vision IP Suite
Private: FUJISOFT
| Method | SAD(Sum of Absolute Difference) | |
|---|---|---|
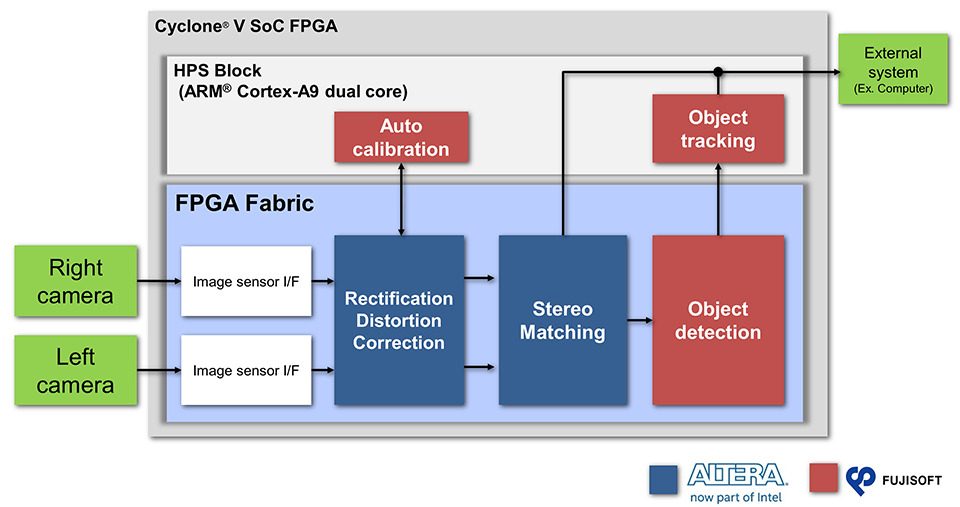
| Features | Rectification Distortion Correction IP | Distortion correction, Left-Right camera position calibration |
| Auto calibration | Performing automatic calibration of camera position over time due to vibration and change in temperature * The auto calibration is a function for stationary stereo cameras. |
|
| Supported resolution | 2044 pixels(H) x infinite(V) is supported The resolution of vertical direction (V) for object detection IP that can be recognized at once is 1024 pixels. |
|
| Searching range of disparity | Up to 256 pixels | |
| Gate size | Rectification Distortion Correction IP Stereo Vision IP Object detection IP |
5,200 LEs / 2,000 ALMs 19,600 LEs / 7,400 ALMs 28,300 LEs / 10,700 ALMs |
| Required memory | Rectification Distortion Correction IP Stereo Vision IP Object detection IP |
156(M10K) 108(M10K) 5(M10K) |
| Required DSP block | Rectification Distortion Correction IP Stereo Vision IP Object detection IP |
62 0 1 |
| IP latency | Rectification Distortion Correction IP Stereo Vision IP Object detection IP |
25 Line 20 Line 1 Frame |
| Bus specification | Avalon Memory-Mapped (Avalon-MM) interfaces Avalon Streaming (Avalon-ST) Video interface (User packed type) |
|
| Input image | Left right Camera image / 8 bit Grayscale | |
| Output image | Left right Camera image 8bit Left right Camera image after correction 8bit Disparity image 12 bit (integer 8 bit, float 4bit) |
|
Arria® V SoC
Cyclone® V SoC
| Deliverables | licensing model and price |
|---|---|
Product deliverables
Sample
|
Please contact us about licensing model and price Embedded production promotion division IP business group TEL:+81 50-3000-2102 Contact us via email |
